惯性导航imu、惯性导航 IMU 的工作原理是什么?
惯性导航 IMU 是一种用于测量物体运动状态的装置,它结合了陀螺仪和加速度计的技术,能够提供物体在空间中的三轴角速度和三轴加速度信息。通过对这些数据的处理和分析,惯性导航 IMU 可以推算出物体的位置、速度和姿态等导航参数。
惯性导航 IMU 的工作原理基于以下几个基本物理定律:
1. 牛顿第一定律:物体在不受外力作用时,将保持静止或匀速直线运动状态。
2. 牛顿第二定律:物体受到外力作用时,将产生加速度,加速度的大小与外力成正比,方向与外力方向相同。
3. 牛顿第三定律:两个物体之间的作用力和反作用力大小相等,方向相反。
陀螺仪利用物体的角动量守恒原理,通过测量物体的旋转角速度来确定物体的方向。陀螺仪内部通常包含一个旋转的陀螺转子,以及一系列的传感器和电路,用于检测陀螺转子的旋转运动。当陀螺仪受到外界干扰时,陀螺转子会产生与干扰方向相反的力矩,从而保持其方向不变。
加速度计则利用物体的惯性原理,通过测量物体在加速度方向上的力来确定物体的加速度。加速度计内部通常包含一个质量块,以及一系列的传感器和电路,用于检测质量块的加速度。当加速度计受到外界加速度时,质量块会产生与加速度方向相反的力,从而产生与加速度成正比的电信号。
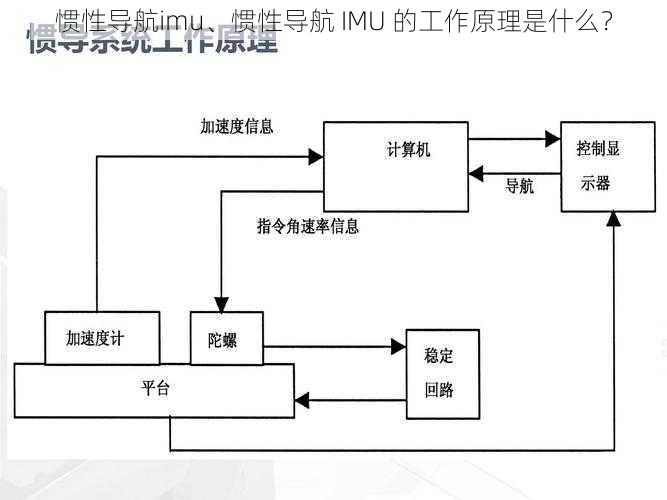
惯性导航 IMU 通过同时测量物体的角速度和加速度,并结合物体的初始位置和速度信息,利用陀螺仪的角动量守恒原理和加速度计的惯性原理,推算出物体的位置、速度和姿态等导航参数。在实际应用中,惯性导航 IMU 通常需要与其他导航传感器(如 GPS、磁罗盘等)进行组合使用,以提高导航精度和可靠性。
惯性导航 IMU 是一种基于物理定律的高精度导航传感器,它通过测量物体的角速度和加速度,推算出物体的位置、速度和姿态等导航参数,广泛应用于航空航天、军事、汽车、机器人等领域。